
Aaron Schmitz
Hello! My name is Aaron. I graduated with honors from the Cooper Union in 2023 with a degree in mechanical engineering and a minor in computer science. My previous work includes robotics, artificial intelligence, machine learning, systems engineering, mechatronics, software development, thermodynamics, and feedback controls. I love interdisciplinary projects and always try to expand my skillset. Take a look at some of my previous projects below!
List of Projects
 Squid Propulsion System
Squid Propulsion System Harlem Courthouse Energy Audit
Harlem Courthouse Energy Audit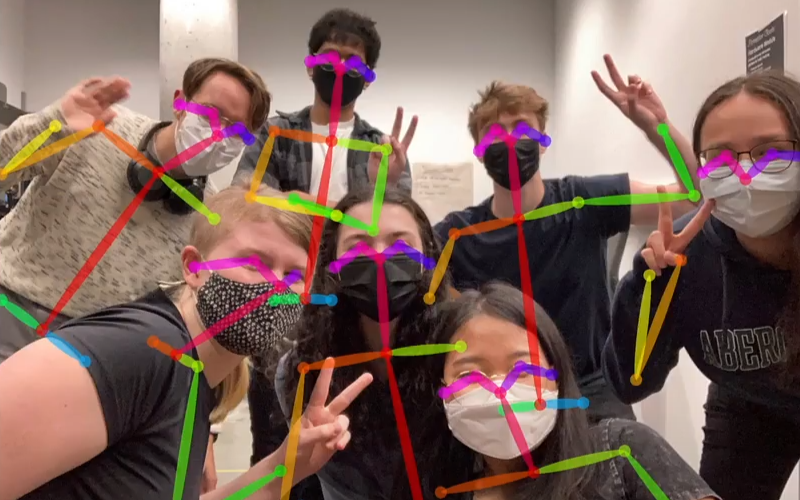 3D Position Estimation
3D Position Estimation Motorsports Team Lead
Motorsports Team Lead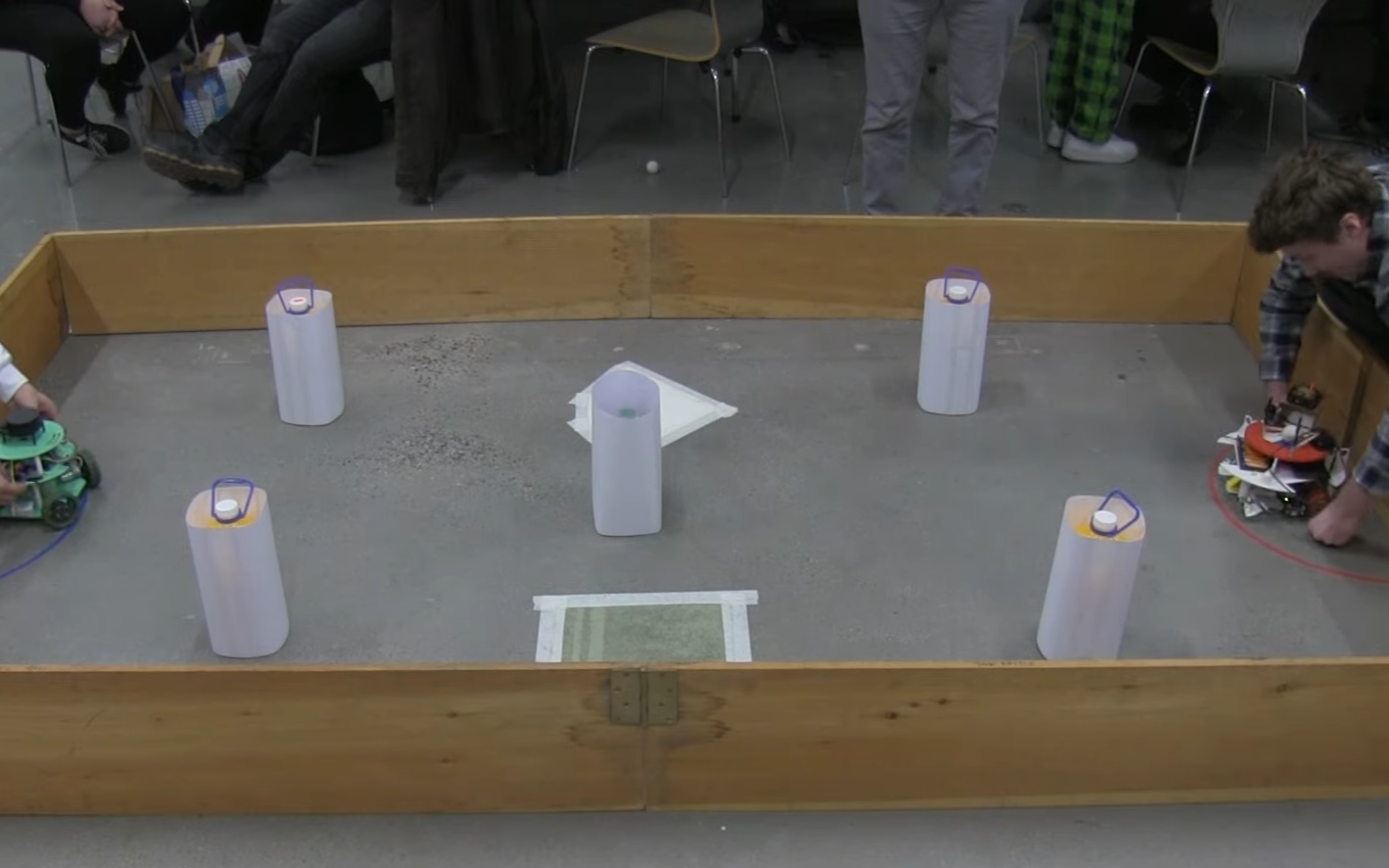 Autonomous Battlebot
Autonomous Battlebot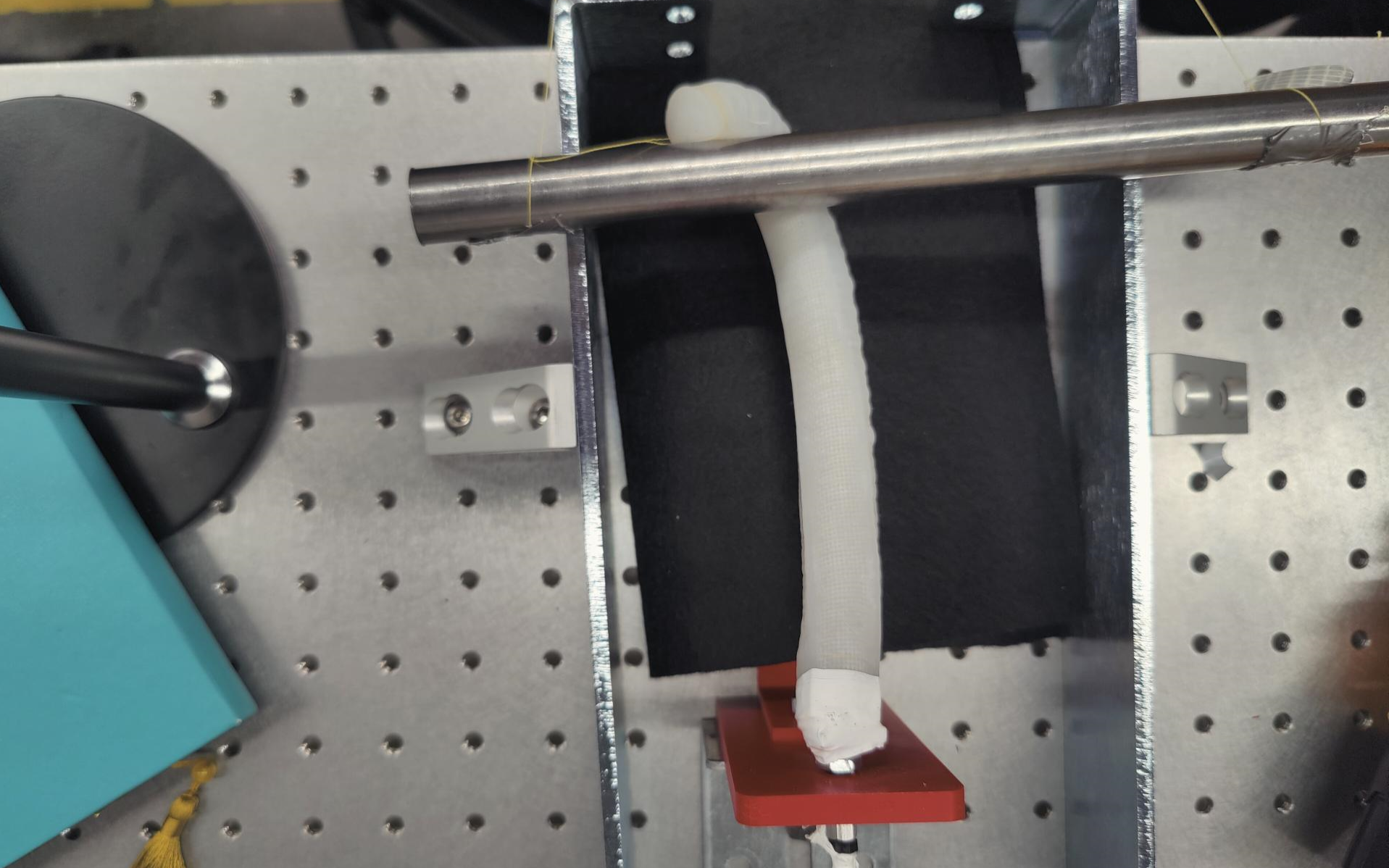 Bio-Inspired Robotics
Bio-Inspired Robotics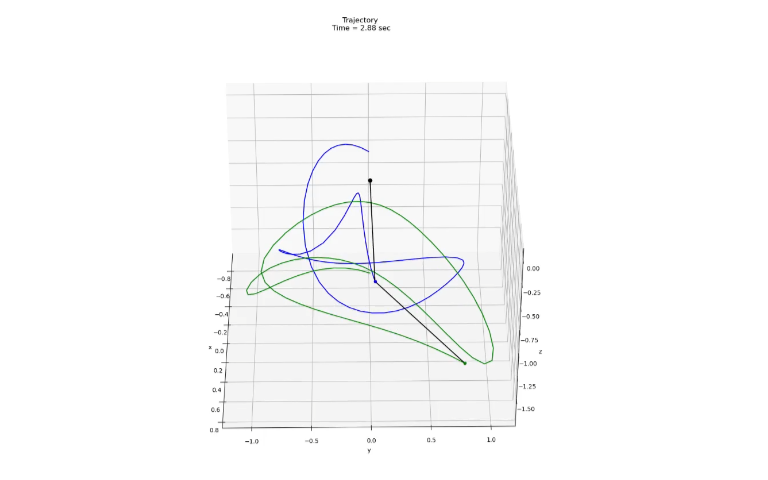 3D Double Spherical Pendulum
3D Double Spherical Pendulum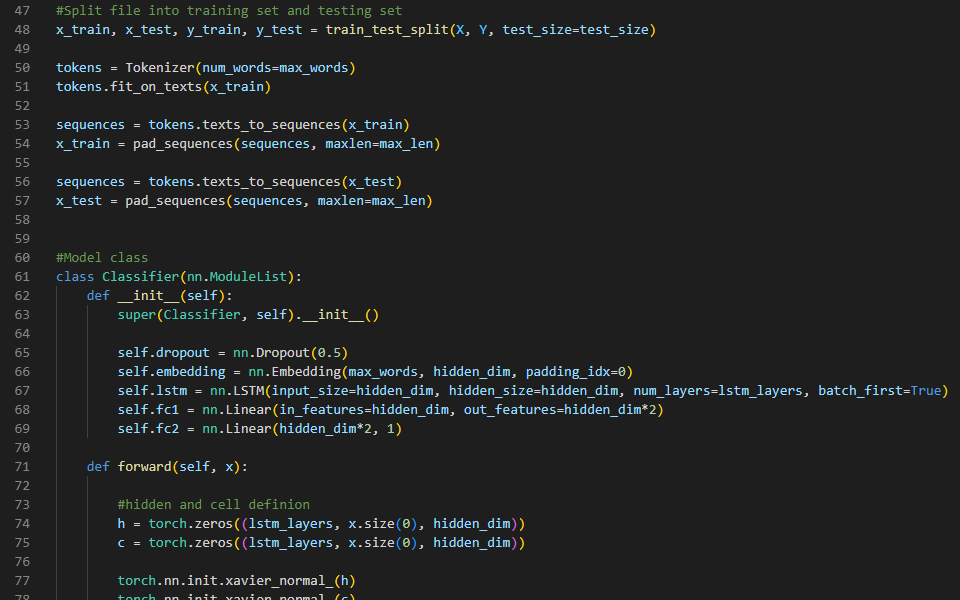 Detecting Locations with a Neural Network
Detecting Locations with a Neural Network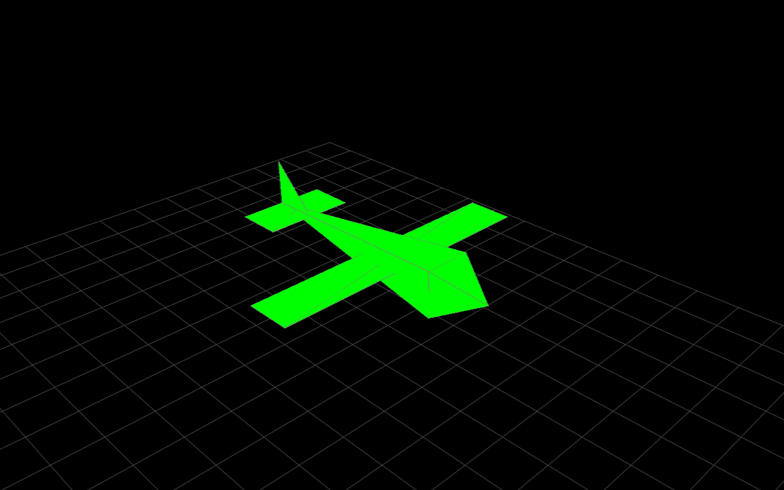 Aerodynamics Simulation
Aerodynamics Simulation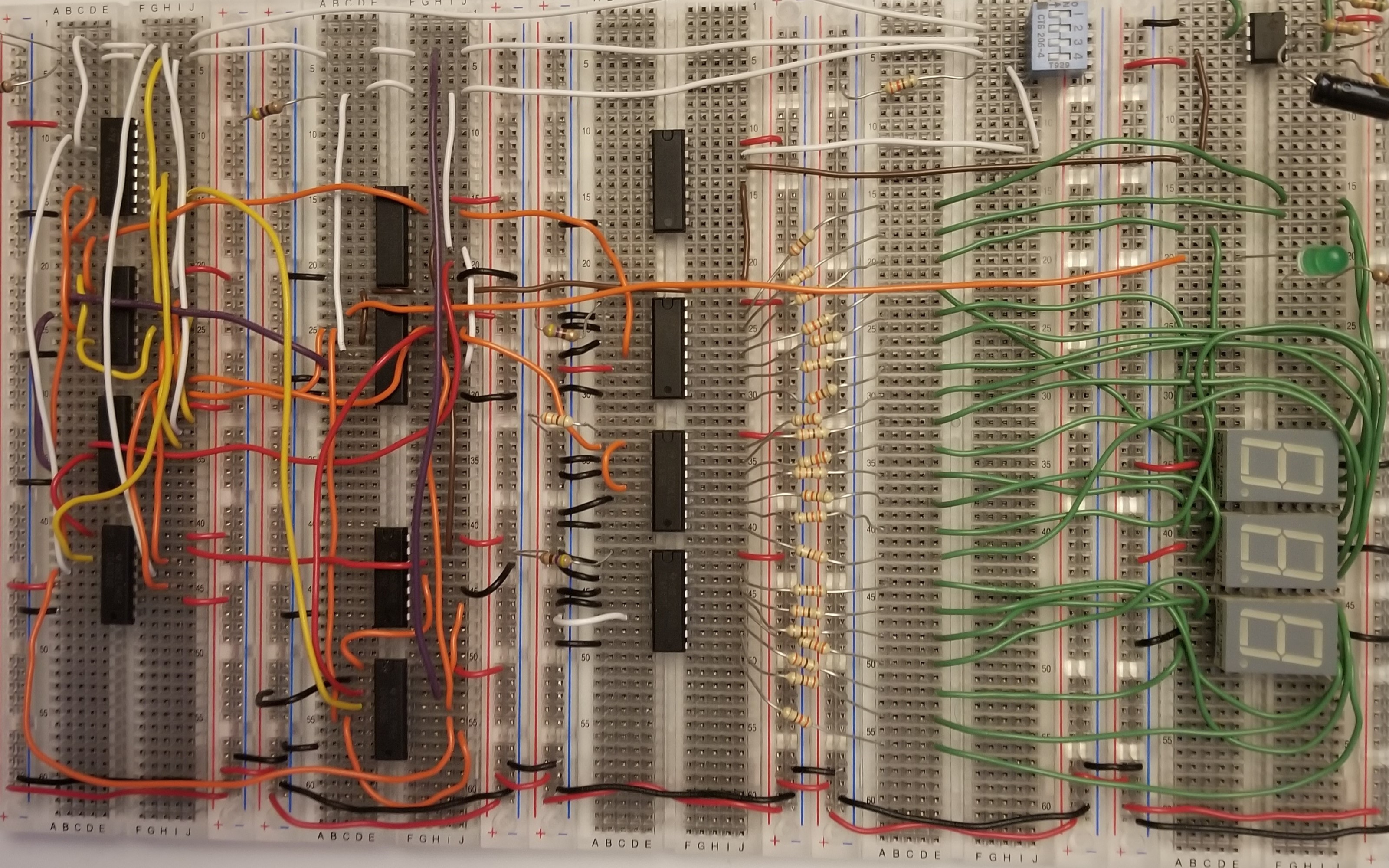 Elevator Circuit
Elevator Circuit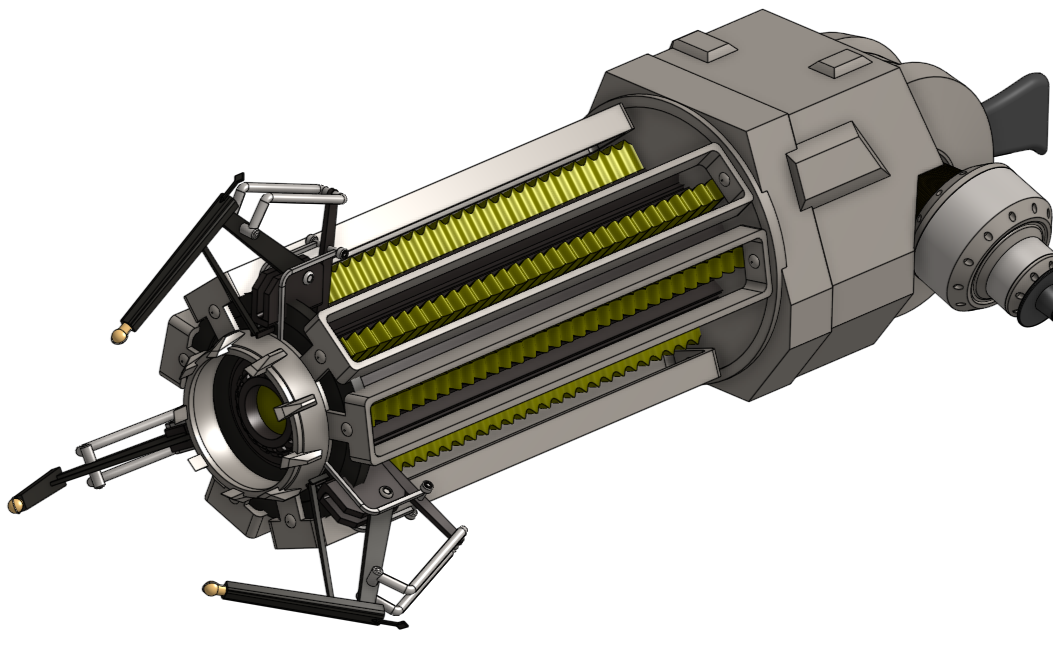 Gravity Gun
Gravity GunProjects
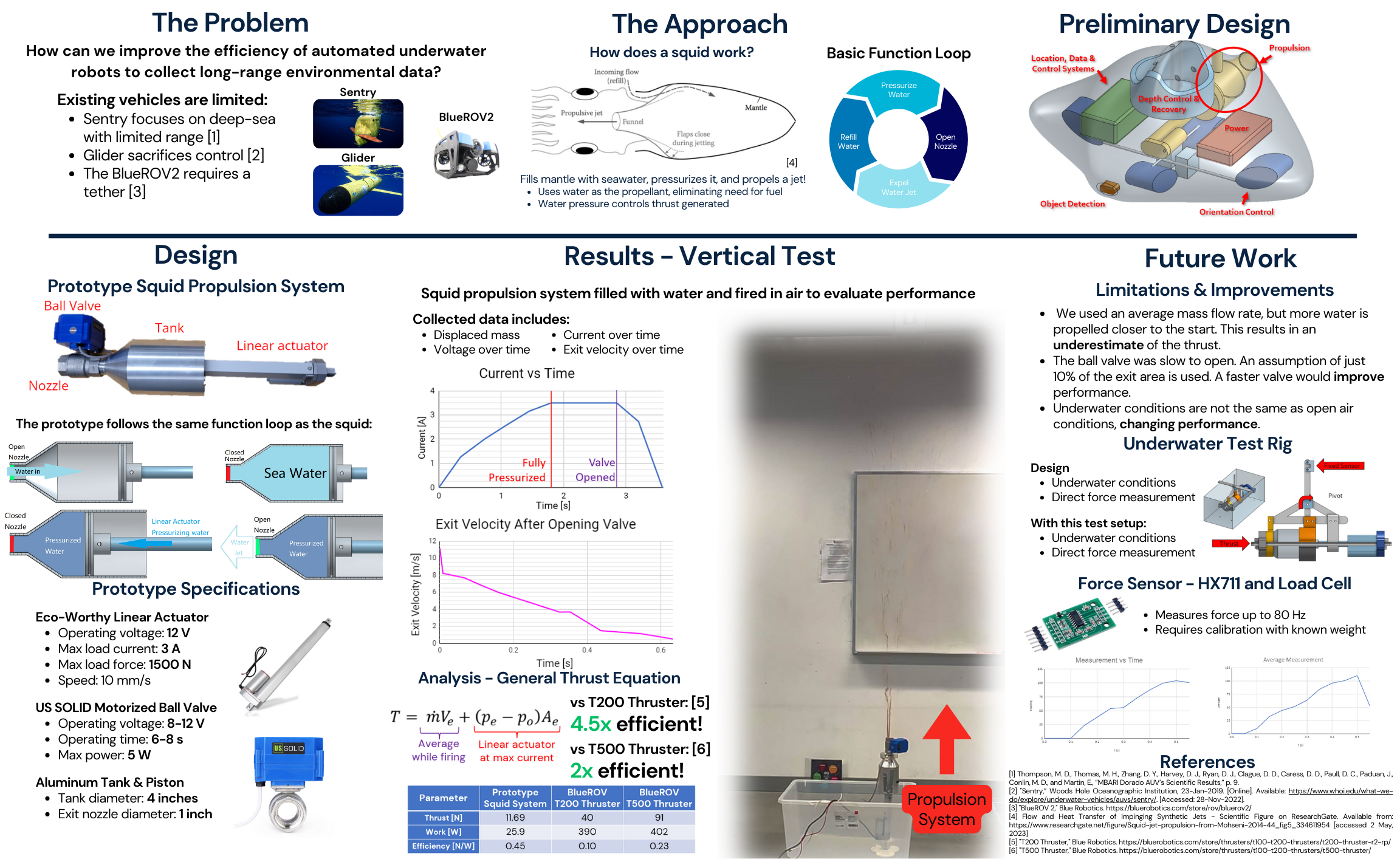
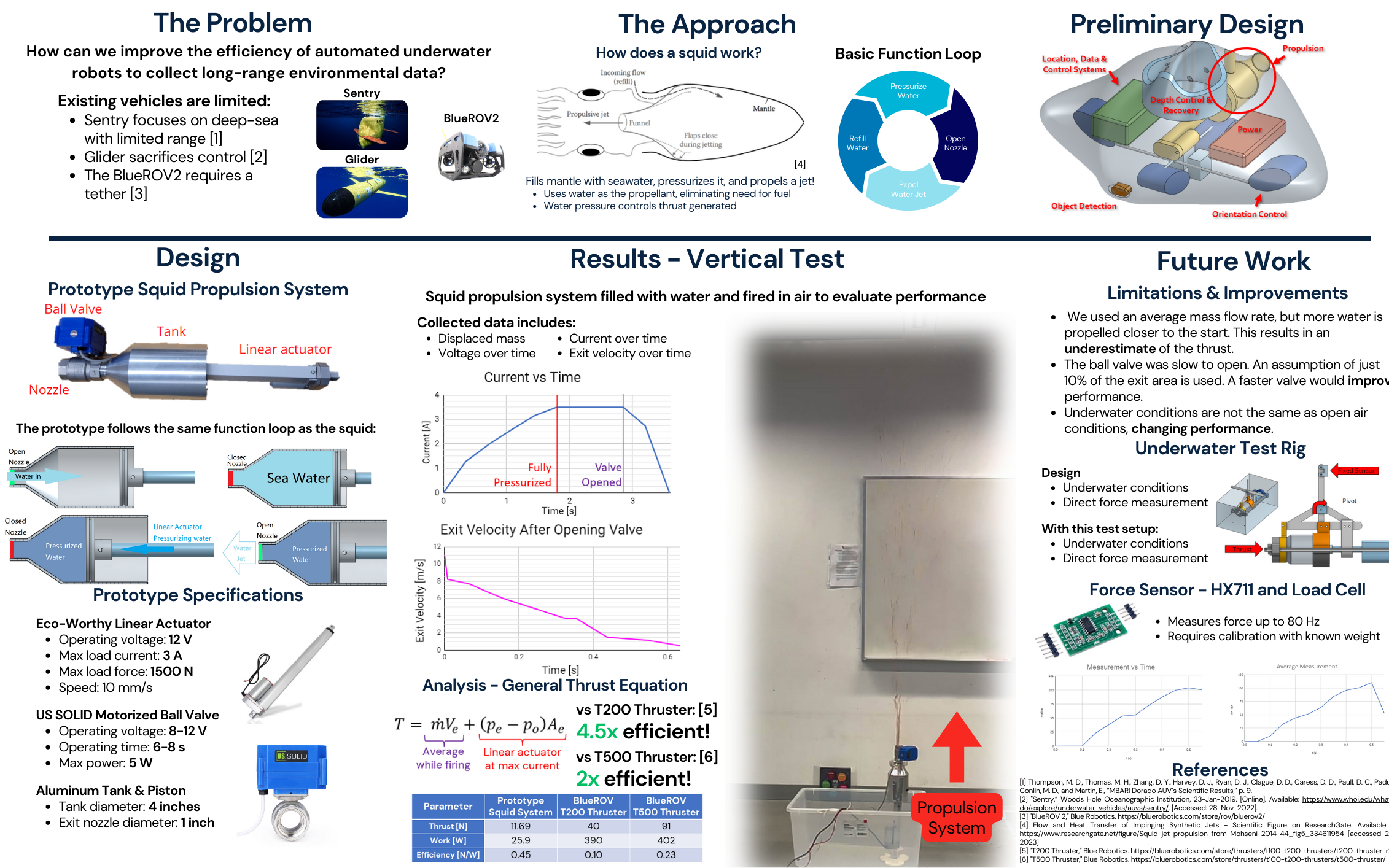
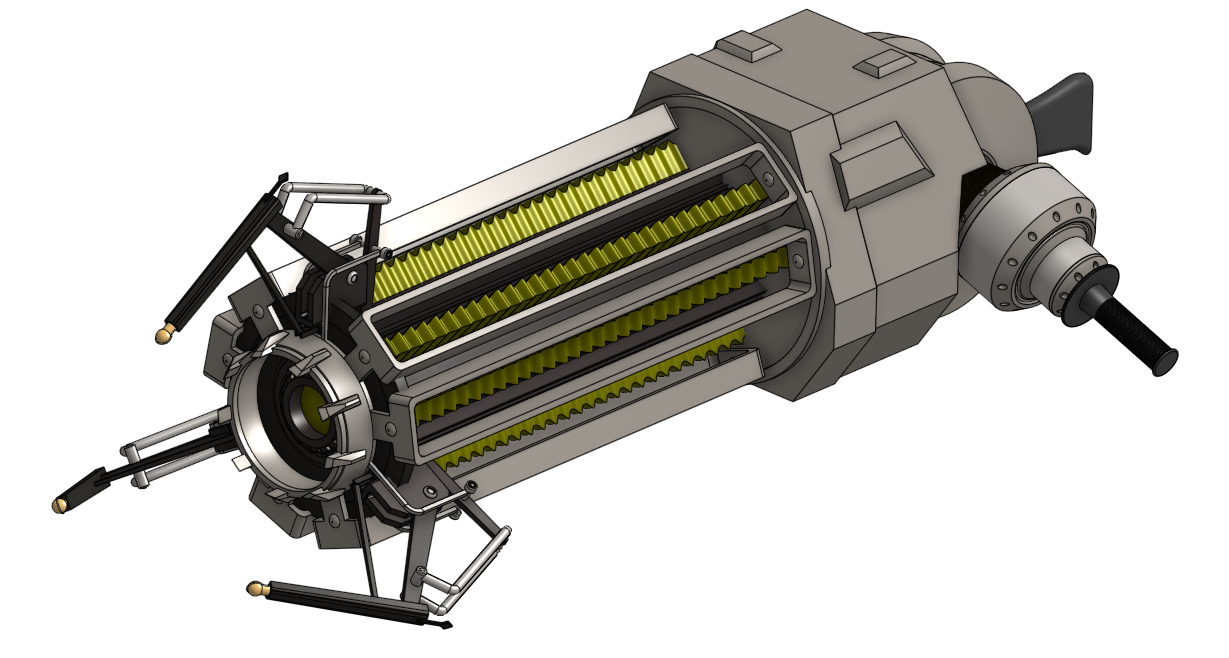
Swim Like A Squid: A Squid-like Propulsion System
2022-2023
Senior Project advised by Dr. Michelle Rosen and Dr. Carl Sable
With Sophia Xu and Will Wu
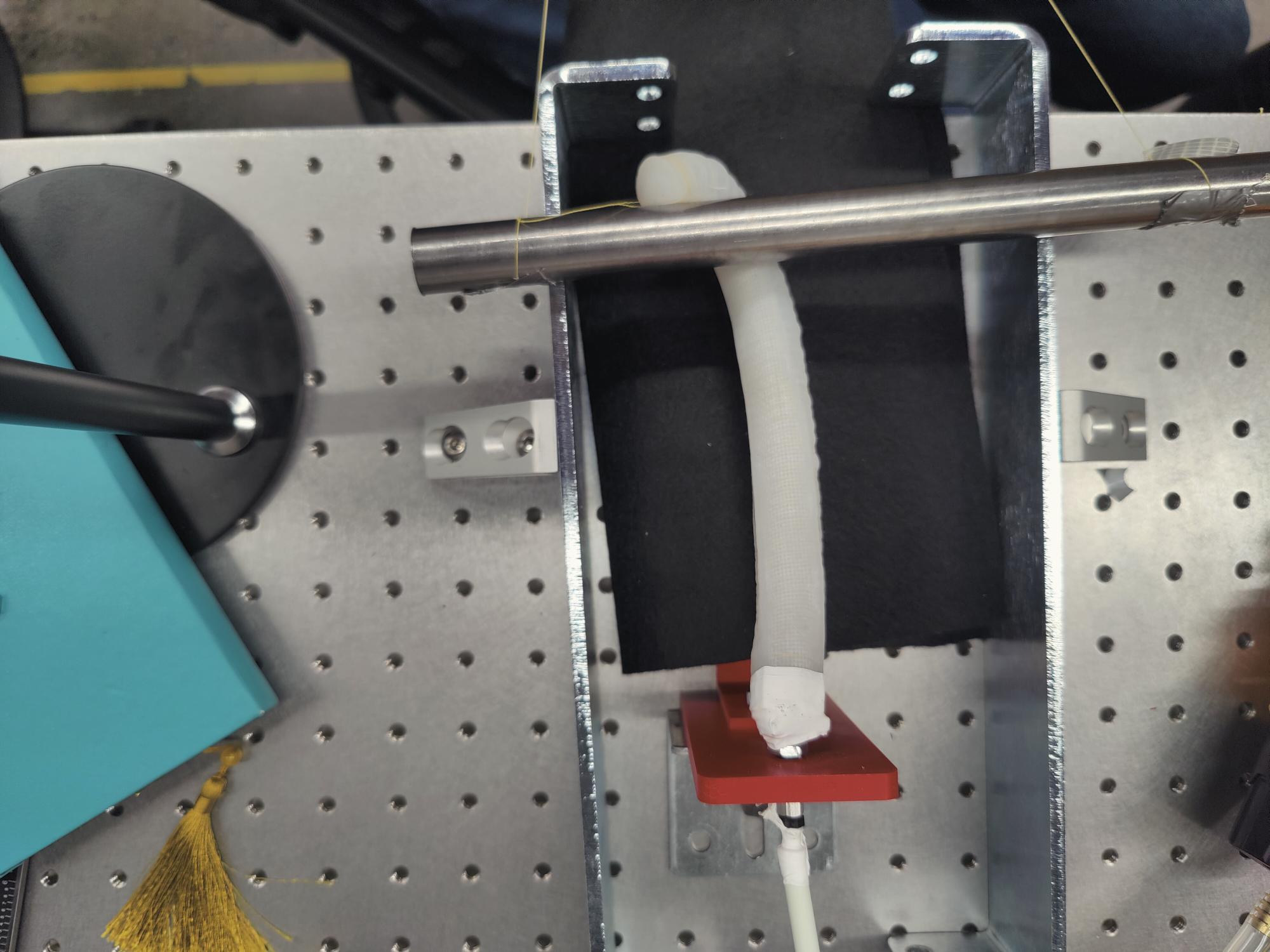
For my senior project, I created a propulsion system for an autonomous underwater squid robot - a novel solution to the challenge of collecting sensor data in three-dimensional underwater environments over expansive distances. A squid-like propulsion system generates thrust by pressurizing and ejecting a seawater jet, providing efficient jet propulsion using seawater as propellant. To demonstrate the concept's effectiveness, I successfully manufactured and tested a prototype propulsion system, resulting in 4.2 times the efficiency of Blue Robotics' T200 Propeller and 2 times the efficiency of their newest T500 propeller.
The development process for the project was student-led, with all of the concepts, design, iterations and testing performed independently. Advisors provided valuable feedback during each stage of the design process. This project was an incredible learning experience and I succeeded in developing a system more efficient than contemporary propellers on the market. Click on the photos to learn more!

Harlem Courthouse Energy Audit
Summer 2022
NYC Department of Design and Construction (DDC)
Advised by Adele Finer and Bryan Simpson
For my summer internship at the DDC, my largest project was to independently create an ASHRAE 211 Standard Level 2 Energy Audit of the Harlem Courthouse on 170 E 121st Street. The report was presented to leadership at the DDC and the Department of Civil and Administrative Services (DCAS) and later used as justification to upscope an existing project to include air-source heat pumps and envelope improvements.
The project was an amazing opportunity to get work done in a large-scale organization. Learning and applying new knowledge on energy conservation, HVAC systems, and structural engineering to a real building - and making NYC more sustainable in the process - was a fantastic experience! The images below are select slides from my final presentation. For an article about my time at the DDC, click here.
3D Position Estimation & Applications
2019-2023
Cooper Union Body Tracking Research
Advised by Dr. Mili Shah
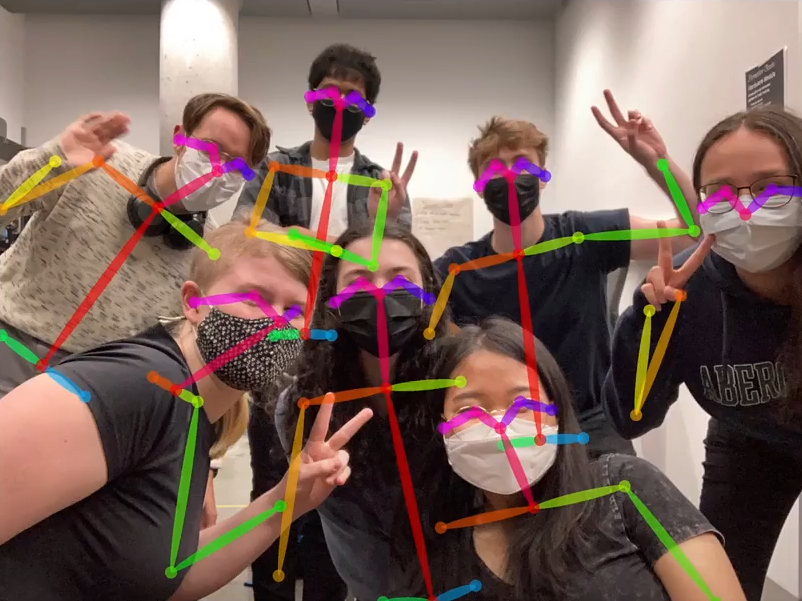
Throughout my four years at the Cooper Union, I worked as part of Cooper's Body Tracking Research Lab to experiment with different methods and applications of body tracking. My work included state of the art motion tracking via the VICON system, developing my own stereo 3D position estimation software using OpenPose and OpenCV, exporting body tracking data to outputs such as Unity, SQL databases, and creating a physical robot through the Robot Operating System (ROS). Check out https://www.youtube.com/watch?v=1T1AiZZ0rCE for a video about some of my work!
The research provided an incredible opportunity to expand my skillset in software development, using and modifying various open-source modules and experimenting with APIs to manage large quantities of data. It also allowed me to explore my own interests in machine learning applications related to computer vision and robotics.

Motorsports Team Lead - Brakes Subsystem Lead and Vehicle Dynamics System Lead
2020-2023
Cooper Union Motorsports Team
As the brakes subsystem lead in 2020-23 and Vehicle Dynamics (VD) system lead in 2021-23, I was responsible for designing, validating, manufacturing, and testing the braking system for our team's race car. This was a self-driven process in which I identified and utilized external resources, such as Rudolf Limpert's Brake Design and Safety, to teach myself the fundamentals of vehicle dynamics.
There are too many SPRINT tasks to count, but my favorite work included using FEA software to calculate the factor of safety and resultant temperature and thermal expansion of the brake rotors, manufacturing them, and testing them on a dynamometer and successfully matching the results to my calculations. Getting the opportunity to defend the brake design to competition judges and achieving the best design result in team history was a huge accomplishment, too!
Autonomous Battlebot
Fall 2022
Autonomous Mobile Robots Classwork
With Netanel Fiorino and Jaewon Sohn
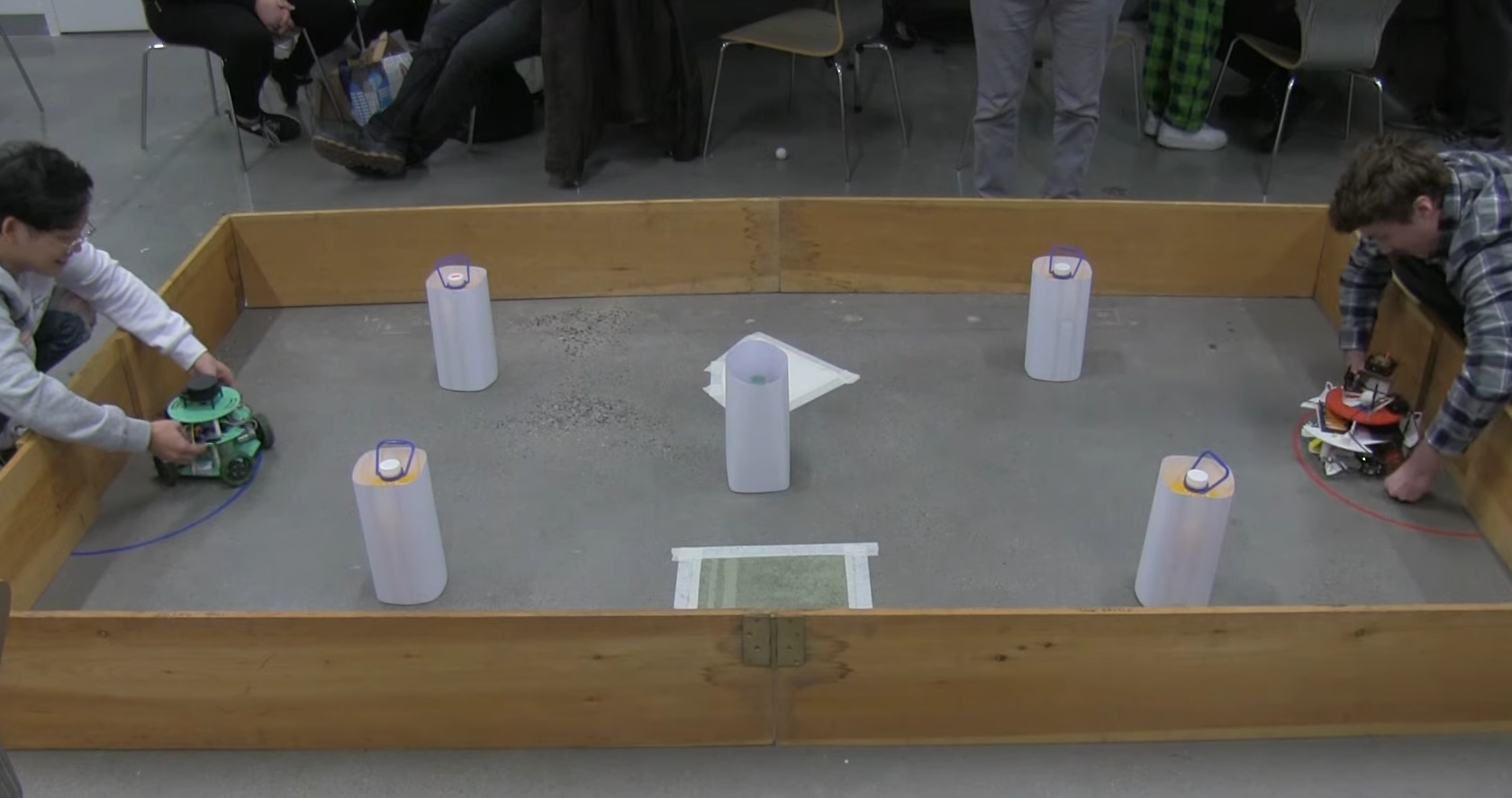
In Autonomous Mobile Robots, the entire class was dedicated to a battle-bot like competition between teams of three people. The challenge was to design and create an autonomous robot capable of navigating an arena full of obstacles, targeting the opponent or the opposing goal, aiming and firing a ping pong ball to hit them, and returning to home base. Our team was the only one in the 2022 competition to achieve all four objectives: hitting the opposing robot, hitting the opposing base, traversing halfway across the arena without a collision, and returning to home base after hitting a target.
Our design used a three-wheel drive as a base, with an independently rotating turret that used a camera with an infrared lens to detect IR light targets. The turret contained a spring-loaded firing mechanism. Our battlebot navigated without user input by detecting obstacles with ultrasonic sensors. Competing in such an engaging challenge under tight deadlines was an extremely valuable experience! A video of the competition can be viewed here.
Bio-Inspired Robotics
2022-2023
Bio-Inspired Robotic Design Lab
With Sophia Xu, Advised by Dr. Michelle Rosen
To learn about non-traditional actuation methods, Sophia and I manufactured soft actuators using silicon molding as a novel method of gripping. Instead of a robotic hand, the soft actuators are both durable and able to conform to the shape of what they grip, providing actuation much closer to real-life examples. The swinging motion was analyzed and compared to a pendulum to identify the energy efficiency of swinging with a soft actuator for each swing.
3D Double Spherical Pendulum
Spring 2023
Advanced Dynamics Classwork
With Netanel Fiorino and Andrew Kim
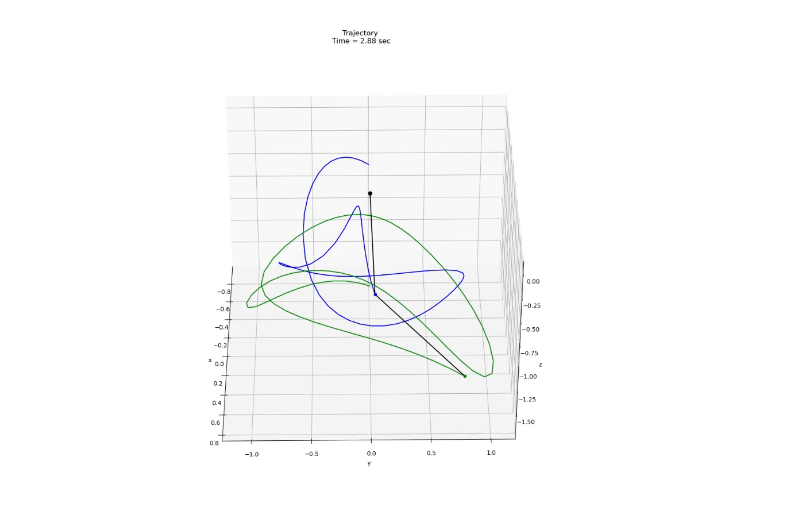
For our final project, we developed a model of a 3D double spherical pendulum - a pendulum attached to another, with both able to move in three dimensions. This is a very computationally expensive problem, but we were able to learn how to optimize our solver to ensure the resulting motion could be calculated in a reasonable amount of time.

Detecting Locations with a Neural Network
Spring 2023
Natural Language Processing Classwork
My final project for Natural Language Processing was a Long Short-Term Memory (LSTM) neural network that accepted one-sentence long descriptors of an image, and categorized the image as occuring "inside" or "outside". The above text is a sample input. It was an excellent opportunity to expore common machine learning libraries like PyTorch and Tensorflow.
Aerodynamics Simulation
Fall 2022
Drone Control Classwork
With Sophia Xu
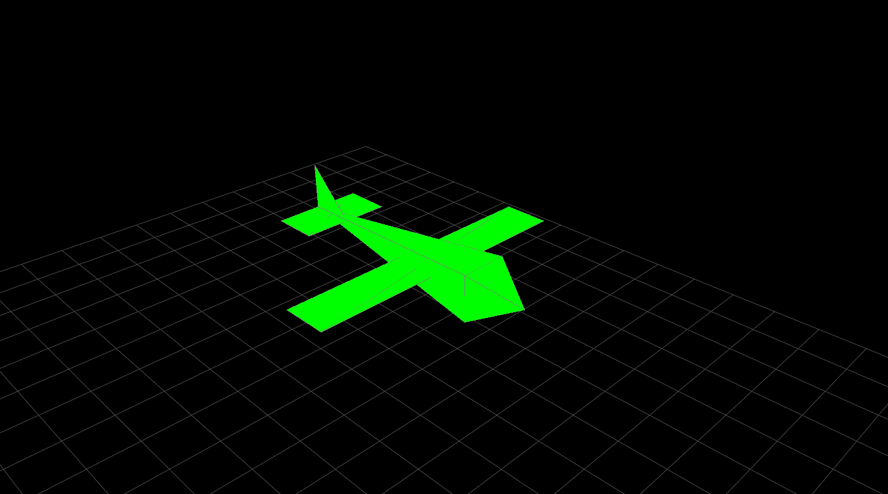
Throughout the semester, we created and expanded a Python simulation of an aircraft following Small Unmanned Aircraft: Theory and Practice by Randy Beard and Tim McLain. We created a real-time simulation of a rigid body aircraft with propellers that could maintain stability during flight.
Elevator Circuit
Spring 2020
Digital Logic Design Classwork
With Jaewon Cho
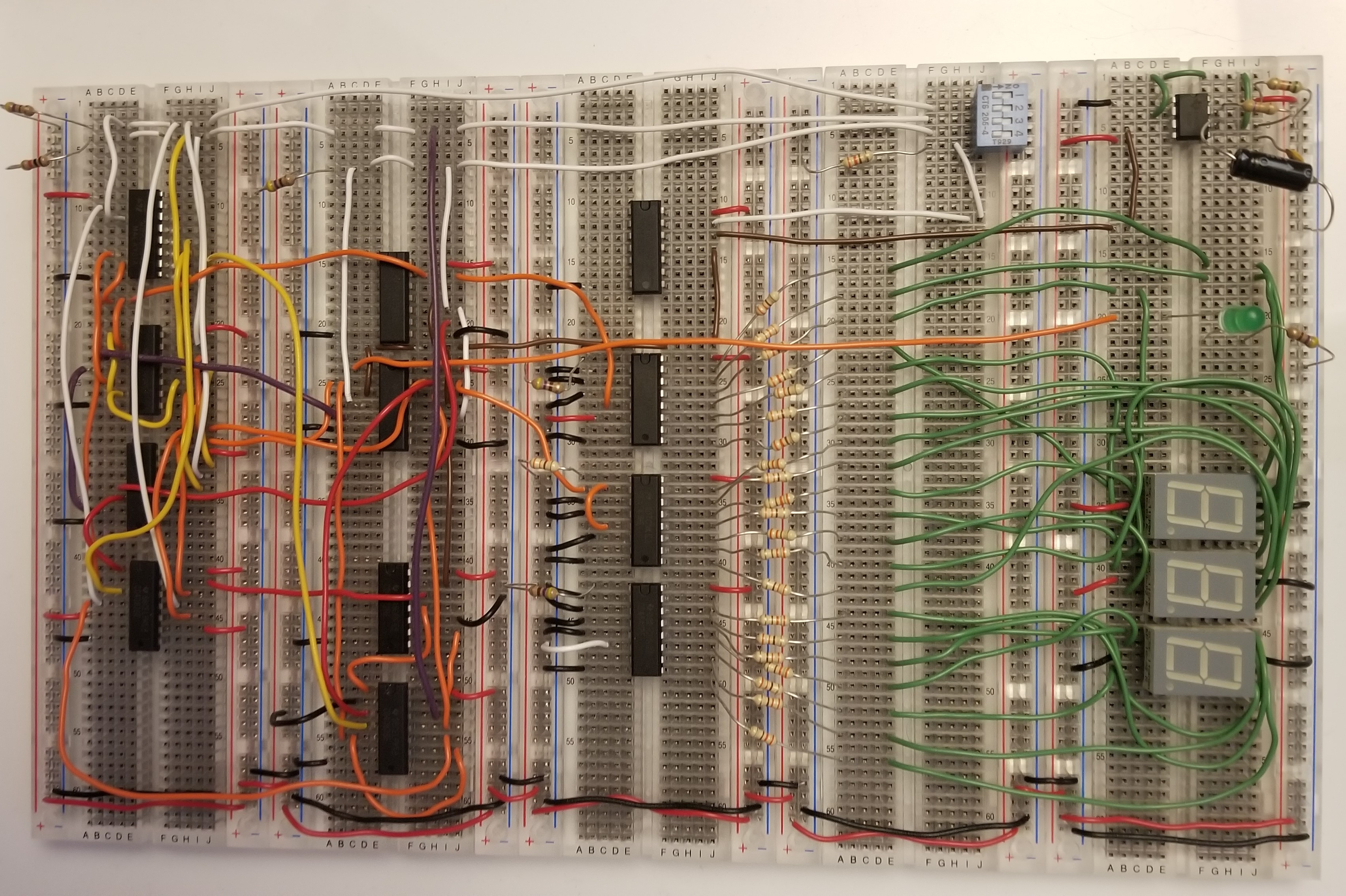
To expand my skillset beyond just mechanical engineering, I took Digital Logic Design in my freshman year to explore electrical engineering fundamentals. For the final project, Jaewon and I created a fully functional elevator circuit using logic gates, starting with Karnaugh maps, simulating the circuit in Logisim, and successfully creating a physical circuit that met our specifications.
Gravity Gun
Fall 2019
Computer Aided Design Classwork
For this project, I modeled the gravity gun from Half-Life 2 in Solidworks. I really like how it turned out!
And This Website!
I made this website from scratch using Next.js to learn more about web development!